 |
| July 28, 2020 | Volume 16 Issue 28 |
Motion Control News & Products

Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Robots think and act on the fly at moving assembly line speeds
 Inbolt and FANUC are launching a manufacturing breakthrough enabling FANUC robots to tackle one of the most complex automation challenges: performing production tasks on continuously moving parts at line speeds. With Inbolt's AI-powered 3D vision, manufacturers can now automate screw insertion, bolt rundown, glue application, and other high-precision tasks on parts moving down the line without costly infrastructure investments or cycle time compromises.
Inbolt and FANUC are launching a manufacturing breakthrough enabling FANUC robots to tackle one of the most complex automation challenges: performing production tasks on continuously moving parts at line speeds. With Inbolt's AI-powered 3D vision, manufacturers can now automate screw insertion, bolt rundown, glue application, and other high-precision tasks on parts moving down the line without costly infrastructure investments or cycle time compromises.
Learn more.
Best high-speed rotary bearing in THK history
 THK has developed its best-performing, high-speed rotary bearing ever: the High-Speed, Double-Row Angular Contact Ring BWH. This rotary bearing has balls aligned inside a cage between the inner and outer rings and is part of the THK Rotary Series, along with the cross-roller ring. The main features of this product are its ability to receive loads in all directions as well as its high rigidity and rotational accuracy, which are equal to that of cross-roller rings. By adopting a new structure to change the rolling elements from rollers to balls, this product achieves the greatest high-speed performance ever offered by THK.
THK has developed its best-performing, high-speed rotary bearing ever: the High-Speed, Double-Row Angular Contact Ring BWH. This rotary bearing has balls aligned inside a cage between the inner and outer rings and is part of the THK Rotary Series, along with the cross-roller ring. The main features of this product are its ability to receive loads in all directions as well as its high rigidity and rotational accuracy, which are equal to that of cross-roller rings. By adopting a new structure to change the rolling elements from rollers to balls, this product achieves the greatest high-speed performance ever offered by THK.
Learn more.
Elevating tables: Precise vertical positioning in tight spaces
 As semicon-ductors and optical components become smaller and more sophisticated, the TZ Series of precision elevating tables from IKO International provides exceptional vertical positioning accuracy in a compact size. This unit features a unique wedge mechanism guided in the vertical direction by a pair of IKO C-Lube Super MX linear motion rolling guides arranged in parallel to achieve highly precise positioning with exceptional rigidity. An optional linear encoder provides full closed loop control to achieve positioning accuracy as high as 0.005 mm, with repeatability of +/-0.001 mm.
As semicon-ductors and optical components become smaller and more sophisticated, the TZ Series of precision elevating tables from IKO International provides exceptional vertical positioning accuracy in a compact size. This unit features a unique wedge mechanism guided in the vertical direction by a pair of IKO C-Lube Super MX linear motion rolling guides arranged in parallel to achieve highly precise positioning with exceptional rigidity. An optional linear encoder provides full closed loop control to achieve positioning accuracy as high as 0.005 mm, with repeatability of +/-0.001 mm.
Learn more and get all the specs.
This cobot is all about safety around people
 The COBOTTA PRO from DENSO Robotics is a lightweight, high-speed collaborative robot designed for communication between workers and robots while maximizing productivity. It delivers a blend of productivity and safety for both simple tasks and multi-step processes like assembly and inspection work. The 6-axis unit operates at speeds up to 2,500 mm per sec when no workers are near and slows or stops when people approach. Two models available: PRO 900 (max payload 6 kg) and PRO 1300 (max payload 12 kg). Many more functions and features.
The COBOTTA PRO from DENSO Robotics is a lightweight, high-speed collaborative robot designed for communication between workers and robots while maximizing productivity. It delivers a blend of productivity and safety for both simple tasks and multi-step processes like assembly and inspection work. The 6-axis unit operates at speeds up to 2,500 mm per sec when no workers are near and slows or stops when people approach. Two models available: PRO 900 (max payload 6 kg) and PRO 1300 (max payload 12 kg). Many more functions and features.
Learn more.
Powerful, pull-type clapper solenoids handle myriad jobs
 New powerful, low-profile, pull-type clapper solenoids are available from Magnetic Sensor Systems (MSS). Applications include valve control, locks, starters, ventilators, clamping, sorting, appliances, tools, HVAC, brakes, clutches, switches, mixing, fire suppression systems, door controls, detent latches, and more. The S-16-264 Series of 17 Pull-Type Clapper Solenoids have ampere turns (windings) adjusted to meet the specific force and duty cycle requirements of your application. They provide up to 130 lb (578 N) of force.
New powerful, low-profile, pull-type clapper solenoids are available from Magnetic Sensor Systems (MSS). Applications include valve control, locks, starters, ventilators, clamping, sorting, appliances, tools, HVAC, brakes, clutches, switches, mixing, fire suppression systems, door controls, detent latches, and more. The S-16-264 Series of 17 Pull-Type Clapper Solenoids have ampere turns (windings) adjusted to meet the specific force and duty cycle requirements of your application. They provide up to 130 lb (578 N) of force.
Get all the specs for these solenoids and other options.
Tech Tip: Belt, screw, or chain-driven actuator?
 Bishop-Wisecarver provides a quick, very useful guide to help you evaluate the right drive strategy for your system: belt, screw, or chain-driven actuator. Each drive type has unique advantages and limitations, so evaluating all your options will help you find the most suitable actuator setup for your specific application needs.
Bishop-Wisecarver provides a quick, very useful guide to help you evaluate the right drive strategy for your system: belt, screw, or chain-driven actuator. Each drive type has unique advantages and limitations, so evaluating all your options will help you find the most suitable actuator setup for your specific application needs.
Read the Bishop-Wisecarver blog.
Ultra-precise linear stage -- down to 0.005 microns
 PI, a global leader in precision motion control and nanoposi-tioning, now offers fast delivery of the L-511 linear micropositioning stage, which is designed for applications requiring minimum incremental motion down to 20 nm, drive forces up to 22 lb, and multi-axis configuration options. The L-511 can be combined to form XY or XYZ motion systems and integrated with rotary stages. A variety of drive and encoder options (stepper and servo motors, rotary, and linear encoders) enable ultra-fine sensitivity. Applications include: metrology, laser processing, semiconductors, biotech, optical alignment, and advanced automation.
PI, a global leader in precision motion control and nanoposi-tioning, now offers fast delivery of the L-511 linear micropositioning stage, which is designed for applications requiring minimum incremental motion down to 20 nm, drive forces up to 22 lb, and multi-axis configuration options. The L-511 can be combined to form XY or XYZ motion systems and integrated with rotary stages. A variety of drive and encoder options (stepper and servo motors, rotary, and linear encoders) enable ultra-fine sensitivity. Applications include: metrology, laser processing, semiconductors, biotech, optical alignment, and advanced automation.
Learn more and get all the specs.
Choosing the right stepper motor: PM or hybrid?
 According to the experts at Lin Engineering, there are two primary types of stepper motors to consider: permanent magnet (PM) and hybrid. But which is right for your application? Both types have their advantages and disadvantages, and the choice ultimately depends on your specific requirements.
According to the experts at Lin Engineering, there are two primary types of stepper motors to consider: permanent magnet (PM) and hybrid. But which is right for your application? Both types have their advantages and disadvantages, and the choice ultimately depends on your specific requirements.
Read this informative Lin Engineering article.
New PTFE-free linear guide for precise positioning
 The new drylin WWP linear guide from igus features a PTFE-free locking carriage. Engineered from lubrication-free, high-performance polymers and aluminum, the guide offers a lightweight, hygienic, and low-maintenance alternative to complex mechanical and electronic adjustment systems. It is significantly more compact and lightweight than conventional recirculating ball-bearing systems. Applications include interior components in vehicles, aircraft, and furniture.
The new drylin WWP linear guide from igus features a PTFE-free locking carriage. Engineered from lubrication-free, high-performance polymers and aluminum, the guide offers a lightweight, hygienic, and low-maintenance alternative to complex mechanical and electronic adjustment systems. It is significantly more compact and lightweight than conventional recirculating ball-bearing systems. Applications include interior components in vehicles, aircraft, and furniture.
Learn more and get all the specs.
Heavy-duty gear units for mixing and agitating systems
 MAXXDRIVE industrial gear units from NORD DRIVE-SYSTEMS are an established drive solution for heavy-duty applications. In addition to conveying, lifting, and driving, they also play an important role in mixing and agitating systems. MAXXDRIVE units feature a compact, one-piece UNICASE housing that delivers long service life, easy maintenance, and quiet operation. Their robust design handles high axial and radial loads, achieves output torques up to 2,495,900 lb-in., and powers up to 8,075 hp.
MAXXDRIVE industrial gear units from NORD DRIVE-SYSTEMS are an established drive solution for heavy-duty applications. In addition to conveying, lifting, and driving, they also play an important role in mixing and agitating systems. MAXXDRIVE units feature a compact, one-piece UNICASE housing that delivers long service life, easy maintenance, and quiet operation. Their robust design handles high axial and radial loads, achieves output torques up to 2,495,900 lb-in., and powers up to 8,075 hp.
Learn more.
What are non-captive linear actuators?
 According to PBC Linear, their new non-captive linear actuators are different from the more common external versions of lead screw-driven linear actuators because they allow the lead screw to completely pass through the motor. This fundamental difference offers advantages for designs that have limited space available or for engineers looking to shrink the overall size of their design package.
According to PBC Linear, their new non-captive linear actuators are different from the more common external versions of lead screw-driven linear actuators because they allow the lead screw to completely pass through the motor. This fundamental difference offers advantages for designs that have limited space available or for engineers looking to shrink the overall size of their design package.
Read the full PBC Linear blog.
Güdel introduces Swiss-quality tracks for cobots
 Güdel Inc. is highlighting new technologies at Automate 2025 booth #2418 that demonstrate its unmatched ability to solve automation engineering challenges. One is the Cobomover, a 7th-axis linear track purpose-built for collaborative and lightweight robots. Designed and manufactured in Switzerland, this unit extends the working range of robots up to 5 m, allowing them to operate multiple workstations and perform a variety of tasks without manual repositioning. Compatible with over 60 cobots and small traditional robots.
Güdel Inc. is highlighting new technologies at Automate 2025 booth #2418 that demonstrate its unmatched ability to solve automation engineering challenges. One is the Cobomover, a 7th-axis linear track purpose-built for collaborative and lightweight robots. Designed and manufactured in Switzerland, this unit extends the working range of robots up to 5 m, allowing them to operate multiple workstations and perform a variety of tasks without manual repositioning. Compatible with over 60 cobots and small traditional robots.
Learn more and get all the specs.
New open-center XYZ stage
 ThruSight-Focus is a high-performance, compact motion platform specifically engineered for applications requiring dual-side access to the sample or workpiece. It pairs ALIO's monolithic open-center XY stage -- known for its nanometer-level precision, crossed roller bearings, and direct linear drives -- with a novel Z-wedge mechanism that converts horizontal drive force into vertical motion via direct drive. This innovative architecture eliminates backlash, enhances servo responsiveness, and delivers fast, stable Z-axis movements -- all within a low-profile footprint.
ThruSight-Focus is a high-performance, compact motion platform specifically engineered for applications requiring dual-side access to the sample or workpiece. It pairs ALIO's monolithic open-center XY stage -- known for its nanometer-level precision, crossed roller bearings, and direct linear drives -- with a novel Z-wedge mechanism that converts horizontal drive force into vertical motion via direct drive. This innovative architecture eliminates backlash, enhances servo responsiveness, and delivers fast, stable Z-axis movements -- all within a low-profile footprint.
Learn more.
Eaton unveils differential engineered for EVs
 Intelligent power management company Eaton launched a new differential engineered specifically for electric vehicles at Auto Shanghai 2025 in China. The innovative design addresses the unique challenges presented by EV propulsion systems, including shared low-viscosity oil environments, increased sensitivity to noise, and the demands of high and instant torque delivery.
Intelligent power management company Eaton launched a new differential engineered specifically for electric vehicles at Auto Shanghai 2025 in China. The innovative design addresses the unique challenges presented by EV propulsion systems, including shared low-viscosity oil environments, increased sensitivity to noise, and the demands of high and instant torque delivery.
Read the full article.
Top Product: Integrated servo system is 20% smaller than standalone unit
 Applied Motion Products has introduced the MDX+ series, a family of low-voltage servo systems that integrate a servo drive, motor, and encoder into one package. This all-in-one drive is an ideal solution for manufacturers in logistics, AGV, medical, semiconductor, the solar industries, and many others.
Applied Motion Products has introduced the MDX+ series, a family of low-voltage servo systems that integrate a servo drive, motor, and encoder into one package. This all-in-one drive is an ideal solution for manufacturers in logistics, AGV, medical, semiconductor, the solar industries, and many others.
Read the full article.
Weird science: Robot that grips without touching being developed in Switzerland
ETH Pioneer Fellow Marcel Schuck is developing a robotic gripper that can manipulate small and fragile objects without touching them. The technology is based on sound waves.
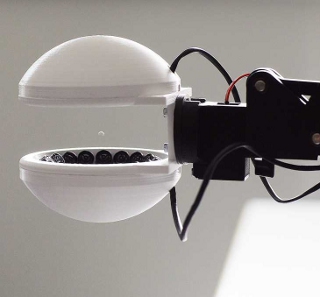
The small installation that Marcel Schuck has assembled on his workbench at ETH university in Zurich, Switzerland, is reminiscent of a school physics lesson: an arrangement, comprising two semi-spheres and resembling a pair of headphones, is connected to a circuit board carrying microchips. He is using the assembly to demonstrate a physical effect. A small sphere hovers between the two semi-spheres, held up by ultrasound waves. "This phenomenon is known as acoustic levitation," the scientist explains.
[Photo credit: ETH Zurich/Stefan Weiss]
As part of his ETH Pioneer Fellowship, the former ETH doctoral student is currently developing a method that makes it possible to lift and manipulate small objects entirely without touching them. This could be particularly relevant in situations where damage to small components costs money, such as in the watchmaking or semiconductor industries.
Conventional robotic grippers sometimes damage fragile objects. To counter this, soft, rubber-like grippers can be used. Although these cause no damage, they are easily contaminated, like a well-used rubber eraser. Additionally, these soft robotic grippers only offer limited positioning accuracy.
"Gripping without touching" is the principle behind Schuck's project called "No-Touch Robotics." The technology is based on an effect that has been exploited for more than 80 years and was first used in space exploration. Ultrasound waves generate a pressure field that humans cannot see or hear. Pressure points are created as the acoustic waves overlay each other, and small objects can be trapped within these points. As a result, they seem to float freely in the air in an acoustic trap.

Marcel Schuck and his "no-grip" gripper. [Photo credit: ETH Zurich/Stefan Weiss]
The installation in his laboratory is the prototype for the product that Schuck wants to develop: an electronically controlled robot gripper using ultrasound. The 31-year-old scientist has fitted numerous small loudspeakers into the two semi-spheres, created using a 3D printer. The associated software allows Schuck to control the loudspeakers such that the pressure points can be moved around. The goal is to change their position in real time without the suspended object falling to the ground. This particular aspect is being researched by ETH doctoral student Marc Rothlisberger, who shares a lab at the Technopark Zurich with Schuck and Christian Burkard, a master's student.
Just using the existing technology, the scientists are able to move various small objects through space. The software adjusts the gripper to the shape of the object to be lifted, and a robot arm then transports the object to the target destination.
The principle of gripping without touching also has an economic benefit: When working with a conventional robot, a different gripper is required for almost every new shape. The acoustic gripper eliminates the need for an extensive set of expensive high-precision grippers.
It is not even necessary for the robot arm itself to be extremely precise. "The exact positioning is determined by the acoustic waves controlled by the software," Schuck says.

[Photo credit: ETH Zurich/Stefan Weiss]
Initially, Schuck wants to use the funding from his ETH Pioneer Fellowship to determine how robot grippers are deployed in practice. "The main aim is to explore the potential fields of application and open doors within industry," Schuck says.
The innovation is likely to be of interest to the watchmaking industry, where highly precise micromechanics is essential for handling expensive, minute components. Toothed gearwheels, for example, are first coated with lubricant, and then the thickness of this lubricant layer is measured. Even the faintest touch could damage the thin film of lubricant. Microchip production might be another attractive market for Schuck's technology.
Schuck is using some of the 150,000 Swiss francs ($157,000) from the fellowship to create a type of development kit for potential clients. This contains a robot gripper, control software, and instructions. Schuck stresses that he still does not know how the end product will look.
"That depends on the feedback I get from industry," he says. He hopes he will find a few interested parties who will collaborate with him on the further development of the acoustic gripper.
On the one hand, this should help to satisfy existing market needs. On the other hand, Schuck is keen for the technology to work not just in the laboratory, but in the real world. If he can manage this by the spring of 2021, Schuck figures he should be able to establish a start-up based on his innovative business idea.
Source: ETH (Eidgenossische Technische Hochschule Zurich)
Published June 2020
Rate this article
View our terms of use and privacy policy