 |
| February 19, 2013 | Volume 09 Issue 07 |
Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Wheels:
Smart actuators bring big benefits to utility and other off-highway vehicles
By Hakan Persson, Product Manager, Thomson Actuators, Thomson Industries, Inc.
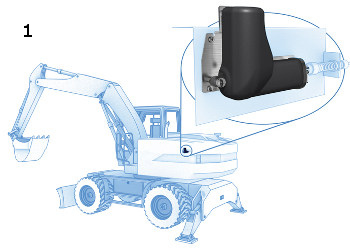
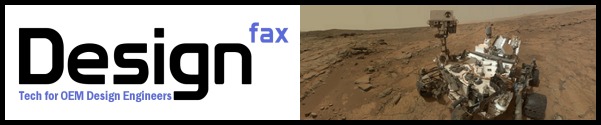
Figure 1: Throttle actuators allow automatic control of engine speed for reduced noise and emissions, and improved fuel economy.
Original equipment manufacturers (OEMs) of industrial utility and other off-highway vehicles are adding automated or improved manual control of many features and functions in order to improve performance, safety, ergonomics, and cost. Frequently, these improvements are based in computing technology that must be translated into physical motion in order to provide a benefit to the customer. Traditional hydraulic and pneumatic controls are often unsuitable for computer-driven operation, so there is a trend toward increasing use of electrical drive solutions. Smart electrical actuators with built-in position feedback, power systems, and bus communications provide a cost-efficient solution that converts control logic into smart motions.
The traditional role of actuators in off-highway vehicles has involved the application of force under the guiding control of the operator to perform a task. As vehicles become more sophisticated, OEMs are adding cutting-edge features that typically involve the use of electronic controls to deliver more complex motion, optimized motion, safer motion, etc. For example, a joy stick provides inputs to a control that drives electrical actuators that steer the tracks of a skid steer (Figure 1).
Interposing the control system between the driver and the steering gear makes it possible to improve the safety of the vehicle by setting limits on the speed with which the vehicle can be driven through a turn. Or, an onboard computer controls a construction excavator to automatically increase the throttle as needed to operate hydraulic equipment and then decrease the throttle to return to the idle position when power is no longer required.
A major obstacle to further advances in this area is the limitations of conventional actuator technology. Traditional hydraulic and pneumatic actuators typically run from one end of the range of motion to the other end without any means for accurate mid-range positioning, which is required by nearly all of the more sophisticated applications. Pneumatic and hydraulic actuators are sometimes fitted with electronic closed-loop feedback, but this adds considerable cost and complexity, since both electronic and hydraulic or pneumatic controls and cabling are needed. Pneumatic and hydraulic actuators also require bulky pumps and valves, and sending heavy cables anywhere that power is to be deployed or controlled (Figure 2).
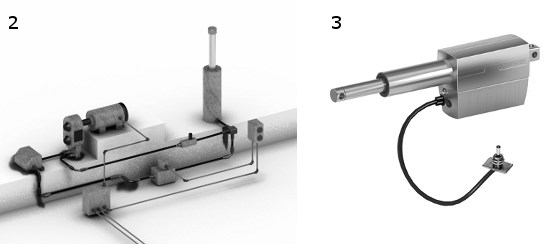
Figures 2 and 3: Replacing hydraulic and pneumatic cylinders with electrical linear actuators means a simpler and smaller installation, easier control, lower energy costs, higher accuracy, less maintenance, less noise, and a clean, healthier environment.
For these reasons, there has been a significant trend toward the use of electric actuators. Electric actuators dramatically reduce the number of components needed by eliminating the required components of a hydraulic system such as reservoir, pump, DC motor, motor relay, solenoid valve, check valve, hydraulic cylinder, and push-button station. They replace cumbersome and sometimes dangerous hydraulic hoses with small, light wires and use actuators that are usually smaller and lighter than hydraulic cylinders but develop the same force and stroke (Figure 3). In addition, electric actuators are considerably less noisy than a hydraulic system.
One electrical actuator option consists of servo and stepper motor actuators that are typically designed to function in an industrial process with a very high level of accuracy and repeatability and a 100 percent duty cycle. These motors are quite expensive and, in most cases, their high cost is not justified for off-highway vehicle applications where objects are positioned a few times an hour (rather than continuously), and an accuracy of 1/16 in. (rather than 0.001 in.) is sufficient.
DC actuators provide a much less expensive alternative that meets the requirements of most off-highway vehicle applications. However, conventional DC actuators require a number of add-on components such as the H-bridge, which is needed for reversing the direction of the motor, as well as power, control, and position sensing systems. These add-ons increase the cost and complexity of the actuator, requiring additional cabling and connectors and extra steps during the assembly process and during maintenance.
More recently, smart actuators have been developed specifically to address the requirements of off-highway vehicle manufacturers that include the H-bridge as well as power, control, and position feedback systems integrated into the actuator. Assembly and maintenance in the vehicle are simplified, because the integration of the H-bridge means that all users have to do is connect the power cables and the bus to the actuator (Figure 4).
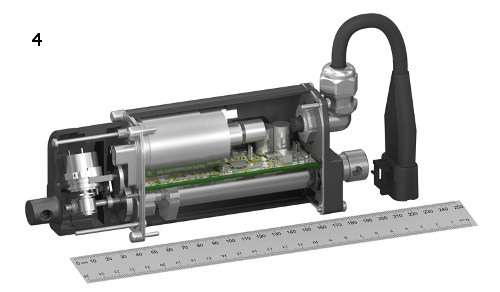
Detail view of a smart actuator developed by Thomson that includes the H-bridge as well as power, control, and position feedback systems integrated into the actuator.
The new generation of smart actuators builds on the proliferation of bus communication that substantially reduces the cost and complexity of integrated vehicle operation. With bus communications, a single control unit can replace the need for multiple single-function controllers. This approach also substantially reduces the amount of wiring required in the vehicle. Using bus communication has already been proven in the automobile industry, and bus communication is used in many of today's vehicles. Manufacturers of off-highway vehicles can utilize the technological advancements and economies of scale that have been developed for the automotive industry in order to increase the functionality and reduce the cost of their own vehicles.
With a traditional approach, an electronic control unit (ECU) is required for each actuator. By using a smart actuator with a bus, rather than running a separate cable from the controller to each actuator as is required with the traditional approach, only a single cable needs to run from the controller that passes each actuator. Each actuator control has a unique address, listens to every signal from the vehicle control system, and responds only to signals with its own address.
Actuators also offer the advantage of providing status information. The command goes out to an actuator to travel to a certain position. When the actuator reaches that position, it sends a clear signal to the control unit. The actuator can also return position and speed information. The implementation of the bus system also makes it simple to add additional sensors that can make other measurements such as temperature or load.
Smart actuators also provide the opportunity to synchronize vehicle functions. For example, suppose that two actuators are required to lift the hood of the vehicle and these actuators must move in conjunction with each other in order to ensure that the load is shared between the two actuators. This is difficult or impossible to accomplish with a hydraulic or pneumatic actuator, but it can easily be accomplished with smart DC actuators. The control system simply sends out a command to move one step to each of the actuators. Then it waits until it receives clear signals from each actuator indicating it has reached the desired position before it sends out the next move command.
Replacing hydraulic steering with electronic steer-by-wire systems offers the potential to add significant functionality by customizing the connection between the steering wheel and steering mechanism. Design engineers can easily change the steering ratio with a software command and can even design the vehicle so that the steering ratio can be changed in the field or programmed to change on the fly, depending on vehicle operating conditions.

Figure 5: Thomson Torque Feedback Device (TFD) provides a variable torque output, in proportion to a DC input, for steering and other by-wire applications.
For example, an electronic steering system could be configured to have a high steering ratio at low speeds and a lower ratio at high speeds to help avoid sudden turns at high speed, or configured to allow for rapid maneuvering at low speed. Electronic steering can be programmed to indicate that the vehicle is nearing the end of the steering range by increasing torque resistance. Electronic steering also opens up the door to other more advanced options such as using torque resistance to prevent the operator from steering toward detected obstacles (Figure 5).
Likewise, smart actuators can be used in agricultural vehicles to optimize the adjustment of harvesting systems on combines. The combine's grain processing chamber takes the threshed grain and cleans it from its chaff by blasting it with air and running it through a sieve. The air-flow louver adjustment controls the volume of air flowing through the cleaning system, and the louvers must frequently be adjusted to optimize the performance of the cleaning unit for various crop conditions. Too much air flow and you lose grain; too little air flow and the chaff isn't blown out. Normally, the operator must climb down from the cab to make these adjustments, which reduces productivity. With electric actuators, this can now be controlled from inside the cab.
There are many potential applications on nearly every type of highway vehicle to combine onboard computers with smart actuators to deliver unique functionality that can set an OEM's product apart from its competitors. OEMs can capitalize on these advantages at the lowest cost by utilizing smart actuators that integrate all of the components needed to deliver motion control in a single package.
Want more information? Click below.
Published February 2013
Rate this article
View our terms of use and privacy policy